郑州地铁维保项目部轨道智能巡检机器人上线运行
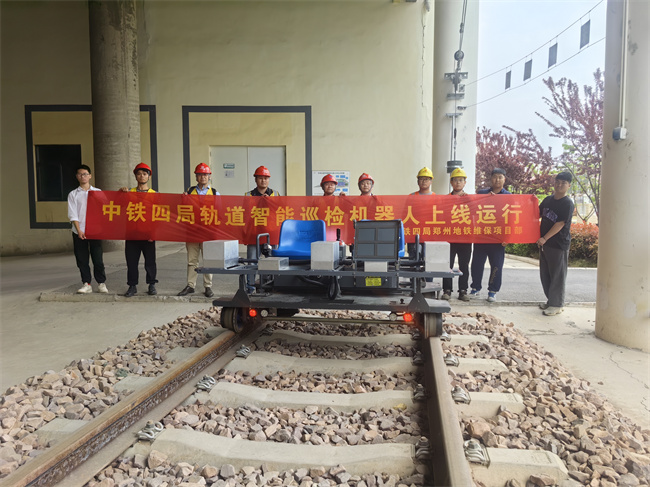
发布时间:2024-04-11 11:04:00 作者:石焕萍 来源:郑州地铁维保项目部 访问量:10674月9日,郑州地铁维保项目部举行轨道智能巡检机器人运用技术交流会,并于次日在郑州地铁5号线中州大道车辆段练兵线进行线上实操,首次上线运行了轨道智能巡检机器人。
轨道智能巡检机器人整体分为驱动模块、从动模块、检测模块、电控模块、动力电池及设备电池共6个模块。轨道智能巡检机器人以视觉测量技术为基础,以人工智能深度学习算法为核心,采用独有的“二维/三维视觉联合测量技术”。轨道智能巡检机器人可对钢轨、扣件、轨枕、道岔、道床等轨道部件的可视病害实现快速、高精、自动、量化检测,检测精度可达1mm,检测范围覆盖整个道床平面,所有检测项目全部实时处理上传,自动出具检测报表。相较于传统的人工轨道巡检,轨道智能巡检机器人在检测病害种类、检测精度和检测时效性等方面具有明显优势。
近期,项目部将组织轨道智能巡检机器人正线运行方案评审,计划在今年6月底正式开始上正线运行。

责任编辑:张功华